(!)Debido al final de soporte anunciado por Microsoft para Internet Explorer 11 con fecha del 15/06/2022, este sitio no recomienda el uso de ese navegador.
Nuestro horario laboral:
Lunes a viernes de 8 a. m. a 6 p. m.
Lunes a viernes de 8 a. m. a 6 p. m.
Todas las categorías
Categorías
- Automatización
- Movimiento lineal
- Movimiento Rotativo
- Partes Conectoras
- Transmisión de potencia rotativa
- Motores
- Transportadores y manejo de materiales
- Localización, posicionamiento, jigs y accesorios
- Inspección
- Sensores, interruptores
- Neumática, Hidráulica
- Componentes para vacío
- Equipo hidráulico
- Equipo de pulverización y accesorios
- Tuberías, tubos, mangueras y accesorios
- Módulos, Unidades
- Calentadores, control de temperatura
- Extrusiones de aluminio, marcos, soportes y postes
- Rodajas, Niveladores para maquinaria, postes
- Puertas, Herrajes para gabinetes
- Resortes, amortiguadores
- Componentes de ajuste / fijación, pasadores, imanes
- Antivibración, Materiales de aislamiento acústico, Productos de seguridad
- Sujetadores y Tornillos
- Materiales
- Componentes para Cableado
- Cables LAN / Cables de red industrial
- Equipo soportado cable
- Cable con conector
- RS232 / computadora personal / cable AV
- Cable de alambre
- Conector (uso general)
- Terminal de crimpado
- Cremallera
- Glándulas de cable
- Cable Buje / Clip / Etiqueta
- Tornillo / espaciador
- Accesorios de cable
- Tubo
- Protección de Manguera
- Conducto / Cableado
- Herramienta de uso general
- Herramientas para conexión
- Suministros de soldadura
- Electrónica y Controles
- Herramientas de Corte
- Fresa de metal duro
- HSS End Mill
- Brocas de hormigón
- Inserto / soporte de fresa
- Brocas para taladro
- Fresa de extremo de hoja recta personalizada
- Cortador dedicado
- Fresa de Llave
- Herramienta de torneado
- Perforar
- Accesorios para herramientas de corte
- Herramientas relacionadas con agujeros de tornillo
- Escariador
- Brocas eléctricas
- Biselado, herramienta de centrado
- Sierras de agujero
- Cortadores de prensa de taladro magnético
- Taladro Escalonado
- Taladros y cortadores de madera
- Herramientas para Proceso
- Herramienta de máquina
- Herramientas de medida / Equipos de medida
- Herramienta de descarga eléctrica
- Suministros de soldadura
- Suministros de pulido
- Suministros para corte
- Herramientas manuales
- Herramienta eléctrica
- Herramienta neumática
- Productos químicos
- Material de reparación / adhesivo
- Productos de soldadura / antiestáticos
- Suministros de almacenamiento de embalaje y logística
- Productos de seguridad
- Investigación y desarrollo y suministros para salas blancas
- Componentes para Prensado
- Moldeado de Plástico
- Pines Eyectores
- Mangas, pasadores centrales
- Pines de corazón
- Boquillas y componentes de entrada
- Fechadores, Insertos de Marca de Reciclaje, Pines con ventilación de gas
- Socavado, placas
- Componentes Guia, componentes para espacio eyector
- Controladores de apertura del molde
- Componentes de enfriamiento o calentamiento
- Accesorios, otros
- Componentes de moldes grandes, fundición a presión
- Moldeado por Inyección
- Agente Purgante
- Productos Maquinados por Moldeo de Inyección
- Accesorios de equipamiento
- Equipo auxiliar
- Pinzas de corte neumáticas
- Cilindros de aire
- Componentes para sujeción neumática
- Componentes para tablero de botador
- Marcos
- Compuestos de succión
- Mandril de aire paralelo
- Portabrocas especial
- Mantenimiento del molde
- Artículos de calefacción
- Hojas para aislamiento térmico
- Acopladores, tapones, juntas de un toque
- Tubos, mangueras, componentes periféricos
Aplicaciones
Marcas

Etapas motorizadas del eje X - guía de rodillos cruzados, carrera 30 mm, XMPG
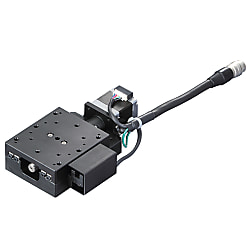
Haga clic en la imagen para ampliarla.


- Producto Nuevo
- Descuento por volumen
Etapa de eje X ligera, compacta y altamente precisa.
- Componentes inCAD
(i)Advertencia
- Consulte el contenido de nuestro sitio web, ya que el PDF no contiene la información más actualizada.
Número de Parte
Se muestra el número de parte configurado
![[Motorizado] X-Axis - Cross Roller: imagen relacionada](http://mx.misumi-ec.com/es/linked/item/10303066030/img/drw_01.gif)
![[Motorizado] X-Axis - Cross Roller: imagen relacionada](http://mx.misumi-ec.com/es/linked/item/10303066030/img/drw_02.gif)
![[Motorizado] X-Axis - Cross Roller: imagen relacionada](http://mx.misumi-ec.com/es/linked/item/10303066030/img/drw_03.gif)
![[Motorizado] X-Axis - Cross Roller: imagen relacionada](http://mx.misumi-ec.com/es/linked/item/10303066030/img/drw_04.gif)
![[Motorizado] X-Axis - Cross Roller: imagen relacionada](http://mx.misumi-ec.com/es/linked/item/10303066030/img/drw_08.gif)
![[Motorizado] X-Axis - Cross Roller: imagen relacionada](http://mx.misumi-ec.com/es/linked/item/10303066030/img/drw_09.gif)
[M] Material: aleación de aluminio
[S] Tratamiento de superficie: anodizado negro
[A] Accesorio: SCB4-16 (4 piezas)
[S] Tratamiento de superficie: anodizado negro
[A] Accesorio: SCB4-16 (4 piezas)
Especificaciones
| Número de parte | - | Sensor | - | Motor | - | Cable |
| XMPG730 XMPG730 | - - | L R | - - | C QA | - - | N N |
| Número de parte | Sensor | Motor | Cable | Estándares Mecánicos | Estándares de exactitud *1 | ||||||||
| Tipo | No. | Posición de la cubierta | Superficie del escenario (mm) | Distancia de recorrido (mm) | Peso (kg) | Precisión de posicionamiento unidireccional | Rigidez de momento ("/ N • cm) | Cabeceo | Bostezando | ||||
| Cabeceo | Bostezando | Laminación | |||||||||||
| XMPG | 730 | L(Estándar) R (Invertido) | C (estándar) | N (Cable no incluido (se vende por separado)) 2A (2 m, paso α) 5A (5 m, paso α) 2R (Cable de robot de 2 m, paso α) 5R (Cable de robot de 5 m, paso α) Para la combinación de motores y cables, consulte la tabla a continuación. | 60×70 | 30 | 0.6 | 5 µm o menos / Carrera completa | 0.15 | 0.08 | 0.07 | 25'' | 20'' |
| MS (□ 38 Micro Paso) | 0.7 | ||||||||||||
| PA (□ 28 α-Paso) | 0.6 | ||||||||||||
| QA (□ 42 pasos α) | 1.0 | ||||||||||||
Número de Parte
Los archivos CAD para descarga y la vista previa 3D no están disponibles debido a que el número de parte no ha sido confirmado.
- *Para abrir las pantallas de archivos CAD y vista previa 3D, el número de parte debe ser confirmado.
- Por favor confirma el número de parte configurando en la columna de la izquierda las "Especificaciones / Dimensiones" antes de poder descargar los archivos CAD o tener una vista previa 3D.
Cargando…
| Número de Parte |
|---|
Cargando…
Más información
![[Motorizado] Eje X - rodillo transversal: imagen relacionada](http://mx.misumi-ec.com/es/linked/item/10303066030/img/oth_08.gif)
![[Motorizado] Eje X - rodillo transversal: imagen relacionada](http://mx.misumi-ec.com/es/linked/item/10303066030/img/oth_09.gif)
![[Motorizado] Eje X - rodillo transversal: imagen relacionada](http://mx.misumi-ec.com/es/linked/item/10303066030/img/oth_01.gif)
■ Tabla de aplicaciones de motor/cable
| Motor | Cable |
| C.MS | N |
| PA | 2 A, 5 A,2R,5R |
| QA | 2 A, 5 A,2R,5R |
■ Especificaciones comunes
*2. Esto representa la distancia recorrida de la etapa por una señal de pulso.
*3. Los valores entre () son para la opción de motor MS (micropaso).
*4. Esto representa la velocidad máxima que puede ser impulsada por el controlador recomendado cambiado al modo de paso completo, con la carga máxima aplicada.
(El valor difiere según el controlador de conducción actual y la carga actual).
El valor varía dependiendo de la opción del motor.
| Tornillo de alimentación | Husillo de bolas ⌀8, paso 1 | |
| Guía | Guías para rodillos cruzados | |
| Resolución*2 | Completo | 2 µm (1 µm)*3 |
| Medio | 1 µm (0,5 µm)*3 | |
| alimentación fina (sobre 1/20 particionado) | 0.05µm | |
| Velocidad máxima*4 | 20 mm/seg | |
| Repetibilidad de posicionamiento | Dentro de ±0,2 µm | |
| Capacidad de carga | 49 N | |
| Movimiento perdido | 1 µm o menos | |
| Reacción | 0,5 µm o menos | |
| Rectitud | 3 µm o menos | |
| Paralelismo | 30 µm o menos | |
| Paralelismo de movimiento | 10 µm o menos | |
*3. Los valores entre () son para la opción de motor MS (micropaso).
*4. Esto representa la velocidad máxima que puede ser impulsada por el controlador recomendado cambiado al modo de paso completo, con la carga máxima aplicada.
(El valor difiere según el controlador de conducción actual y la carga actual).
El valor varía dependiendo de la opción del motor.
■ Especificaciones eléctricas
[ ! ] Los sensores con número de pieza PM-□24 se suspenderán y reemplazarán por productos de próxima generación con número de pieza PM-□25 a partir de abril de 2017.
| Número de pieza | C | MS | PA | QA | |
| Estándar | 38 micropaso | 28 Paso α | 42 pasos α | ||
| Motor | Tipo | Motor paso a paso de 5 fases 0,75 A/fase (Oriental Motor Co., Ltd.) | Motor paso a paso (Oriental Motor Co., Ltd.) | ||
| Número de pieza | PMM33BH2-C16-1 (#28 mm) | C7214-9015-1 (#38mm) | ARM24SAK (#28 mm) | ARM46AC (#42mm) | |
| Ángulo de paso | 0.72° | 0.36° | 0.36° (Cuando se establece 1000P/R) | ||
| Número de pieza del conductor | — | ARD-K | ARD-A | ||
| Conector | Número de pieza | HR10A-10J-12P (73) (Hirose electric co., LTD.) | 172211-6 (Tyco electrónica Japón GK) | ||
| Conector receptáculo aplicable | HR10A-10P-12S (73) (Hirose electric co., LTD.) | 171822-6 (Tyco electrónica Japón GK) | |||
| Número de pieza de contacto | — | 170430-1 (Tyco electrónica Japón GK) | |||
| Número de pieza de contacto del receptáculo aplicable | — | 170205-1 (Tyco electrónica Japón GK) | |||
| Sensor | Sensor de límite | Provisto | |||
| Sensor de origen de hendidura en el hogar | Provisto | ||||
| Sensor de inicio | — | ||||
| Número de pieza | Fotosensor PM-L25 (Dispositivos industriales Panasonic SUNX co., ltd.) | ||||
| Voltaje de la fuente de alimentación | DC5 a 24 V o menos ±10% | ||||
| Consumo actual | 45 mA o menos (15 mA o menos por sensor) | ||||
| Salida de control | Salida de colector abierto NPN 30 V CC o menos, 50 mA o menos Tensión residual 2 V o menos (cuando la corriente de carga es de 50 mA) Tensión residual 1 V o menos (cuando la corriente de carga es de 16 mA) | ||||
| Lógica de salida | Detector (Oscuro): Transistor de salida apagado (No conductor) | ||||
Información básica
| Tipo | Etapas motorizadas del eje X | Material | Aluminio | Guía | Rodillo cruzado |
|---|---|---|---|---|---|
| Métodos de alimentación de mesa | Tornillo de bola | Longitud de la mesa(mm) | 70 | Ancho de la mesa(mm) | 60 |
| Carrera (distancia X)(mm) | 30 | Tratamiento de superficies | Anodizado negro | Orificio pasante (orificio central de la mesa) | Ninguno |
| Capacidad de carga (rango)(N) | 30.1~50 | Carga permisible(N) | 49 | Velocidad máxima(mm / seg) | 20 |
| Precisión de posicionamiento(µm) | 5 | Rectitud de la mesa(µm) | 3 | Paralelismo de mesa(µm) | 30 |
| Rigidez de momento (Pitching)("/ N • cm) | 0.15 | Rigidez de momento (bostezo)("/ N • cm) | 0.08 | Rigidez de momento (rodando)("/ N • cm) | 0.07 |
Specification/Dimensions
-
Motor, características del motor
- Motor paso a paso de 5 fases
- Motor paso a paso
-
Resolución(µm)
-
Sensor de positioína
-
Cable
- 2 m, paso α
- Cable de robot de 2 m, paso α
- Cable de robot de 5 m, paso α
- N (sin cable, el cable se vende por separado)
-
tipo
- XMPG
-
CAD
- 2D
- 3D
Días para enviar
-
- Todos
- 15 día o menos
Especificar las alteraciones
- Es posible que no se incluyeran completamente las especificaciones y dimensiones de algunos productos. Para obtener detalles específicos, consulte catálogos del fabricante .
Otros productos en esta categoría
- Etapas motorizadas del eje X: guía lineal de bolas, perfil bajo, XMSG
- Etapas motorizadas del eje X: guía lineal de bolas, compacta, económica, XCV
- Plataformas motorizadas del eje X: guía de rodillos cruzados, compacta, XCR
- Plataformas del eje XY motorizadas: guía de rodillos cruzados, compacta, XYCR
- Platinas motorizadas del eje X - guía lineal de bolas, carrera 30-75 mm, XCVL/XCVLC
- Platinas motorizadas del eje X - guía lineal de bolas, carrera 100-300 mm, XCVL/XCVLC
- Etapas motorizadas del eje X: guía de rodillos cruzados, carrera 30-100 mm, XMPG
- Plataformas motorizadas del eje X - Guía de rodillos cruzados con ranura en V, compacta - 30 x 30 mm
Productos complementarios
-
 Etapas motorizadas del eje X: guía lineal de bolas, perfil bajo, XMSG
Etapas motorizadas del eje X: guía lineal de bolas, perfil bajo, XMSG
MISUMI Días para el envío: 12 Días o más





¿Cómo podemos mejorar?
¿Cómo podemos mejorar?
Si bien no podemos responder directamente a los comentarios señalados en este formulario, se revisará la información con el fin de establecer mejoras a futuro.
Política de Privacidad del Cliente
Gracias por su ayuda.
Si bien no podemos responder directamente a los comentarios señalados en este formulario, se revisará la información con el fin de establecer mejoras a futuro.
Please use el formulario de consulta.
Política de Privacidad del Cliente